
Scientific Journals
2024
Nature's All‐in‐One: Multitasking Robots Inspired by Dung Beetles
Leung, B., Gorb, S., & Manoonpong, P.
Advanced Science, 2024, 11(47), 2408080.
(JIF = 14.3, SCI, Q1)
[PDF]
2023

Leg-body coordination strategies for obstacle avoidance and narrow space navigation of multi-segmented, legged robots
Mingchinda, N., Jaiton, V., Leung, B., & Manoonpong, P.
Frontiers in Neurorobotics, 2023, 17, 1214248.
(JIF= 3.1, SCI, Q2)
[PDF]

Integrated modular neural control for versatile locomotion and object transportation of a dung beetle-like robot
Leung, B., Billeschou, P., & Manoonpong, P.
IEEE Transactions on Cybernetics, 2023, 54(4), 2062-2075.
(SJR = 4.51, JIF= 19.118, SCI, Q1)
[PDF]
2021
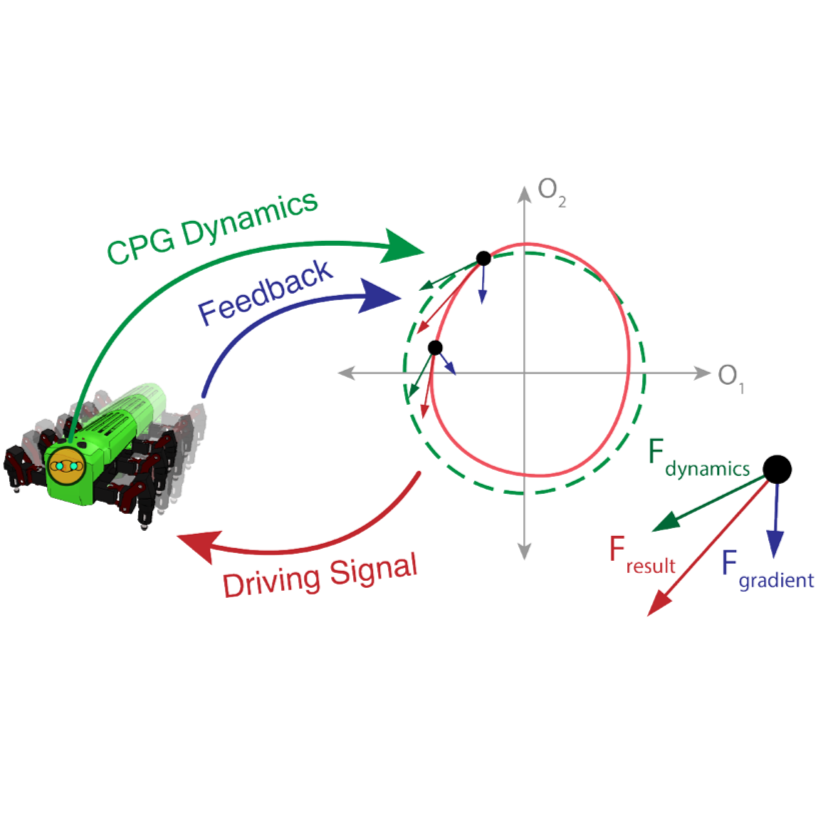
GRAB: GRAdient-based shape-adaptive locomotion control
Phodapol, S., Chuthong, T., Leung, B., Srisuchinnawong, A., Manoonpong, P., & Dilokthanakul, N.
IEEE Robotics and Automation Letters, 2021, 7(2), 1087-1094. (RAL-ICRA)
(SJR = 1.12 , JIF= 4.321, SCI, Q1)
[PDF]
2020
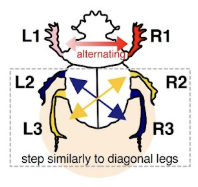
Rules for the leg coordination of dung beetle ball rolling behaviour
Leung, B., Bijma, N., Baird, E., Dacke, M., Gorb, S., & Manoonpong, P.
Scientific reports, 2020, 10(1), 9278.
(JIF 4.525, SJR = 1.41, SCI, Q1)
[PDF]
Conference Papers
2025
Bio-Inspired Plastic Neural Networks for Zero-Shot Out-of-Distribution Generalization in Complex Animal-Inspired Robots
Leung, B., Haomachai, W., Pedersen, J. W., Risi, S., & Manoonpong, P.
arXiv preprint arXiv:2503.12406, 2025.
[arXiv PDF] [Project Page]
2024
2023

A Simple Torque Feedback-based Innate Mechanism for Intra-leg Coordination of Different Robot Morphologies
Leung, B., & Manoonpong, P.
11ᵗʰ International Symposium on Adaptive Motion of Animals and Machines (AMAM 2023), 2023.
[PDF]
2022
Neural body bending control with temporal delays for millipede-like turning behaviour of a multi-segmented, legged robot
Mingchinda, N., Jaiton, V., Leung, B., & Manoonpong, P.
International Conference on Simulation of Adaptive Behavior (SAB), 2022, pp. 52-63. Cham: Springer International Publishing.
[PDF]
2020
Dynamical state forcing on central pattern generators for efficient robot locomotion control
Chuthong, T., Leung, B., Tiraborisute, K., Ngamkajornwiwat, P., Manoonpong, P., & Dilokthanakul, N.
Neural Information Processing: 27th International Conference, ICONIP 2020, Bangkok, Thailand, Springer International Publishing, 2020.
[PDF]
2019
CPG driven RBF network control with reinforcement learning for gait optimization of a dung beetle-like robot
Pitchai, M., Xiong, X., Thor, M., Billeschou, P., Mailänder, P. L., Leung, B., ... & Manoonpong, P.
ICANN, 2019, pp. 698-710. Springer International Publishing. [PDF]

Modular neural control for dung beetle-like leg movements of a dung beetle-like robot
Leung, B., Billeschou, P., Thor, M., & Manoonpong, P.
9ᵗʰ International Symposium on Adaptive Motion of Animals and Machines (AMAM 2019), 2019.
[PDF]
2018

Modular neural control for bio-inspired walking and ball rolling of a dung beetle-like robot
Leung, B., Thor, M., & Manoonpong, P.
Artificial Life Conference Proceedings, 2018, pp. 335-342. MIT Press. [PDF]